
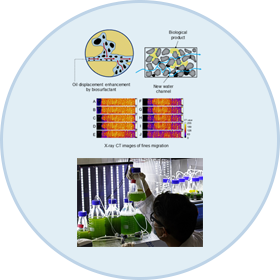
친환경 비전통에너지 연구 권태혁 교수
가스하이드레이트신재생 에너지 인프라 설계 및 진단 연구 김동수 교수
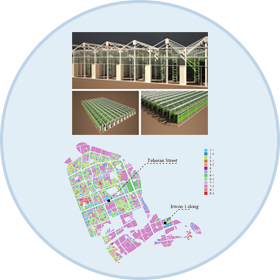
해상 풍력 타워, 인프라 구조물 기반의 에너지 하베스팅 등 신재생 에너지 시스템 설계 및 진단제로 에너지 빌딩 설계 및 도심 에너지 소비 빅데이터 분석 연구 이승래 교수
에너지 고효율 건축 설계, 도시정책을 위한 건물에너지 빅데이터 분석, 에너지 시설물 계획 및 평가탄소중립사회를 위한 지반공학 기술 조계춘 교수
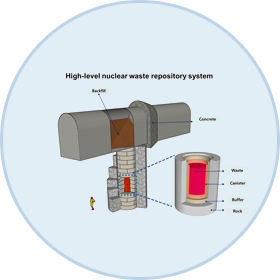
지열 에너지 파일, 이산화탄소 지중 저장, 고준위 방사선 폐기물 지중 저장과 같은 탄소중립 기술 연구-
지속가능한 지반 개량 및
비전통에너지 연구 -

지반 및 기초 구조물의 거동 평가
-
지반구조해석 및 설계
-
지속가능 개발을 위한
차세대 지반공학 기술 개발
대표 연구 업적 에너지인프라시스템 트랙
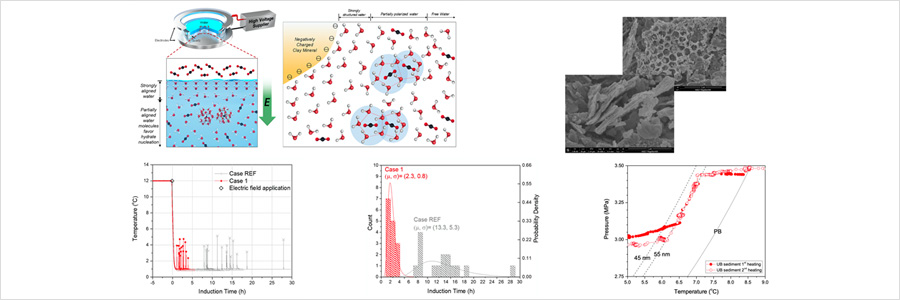
천연 가스 하이드레이트의 심해 점토질 퇴적층 부존원리 규명 (권태혁 교수)
- 2018년 올해의 연구성과 선정
Researchers
연구진
- 권태혁
- 주요 연구 분야
- 비전통에너지 관련 연구
- 공극 규모 모니터링 및 모델링
- 지반현장모니터링
- 연구실
지반에너지연구실
- 웹사이트 http://kwon.kaist.ac.kr/
- 주요 연구 분야
- 주진현
- 주요 연구 분야
- 지반 변형 및 파괴 거동 모델링 및 시뮬레이션
- 다공성/입상/불연속 물질들의 역학 및 다중물리
- 물리 시뮬레이션, 센싱, 머신 러닝을 결합한 디지털 트윈 기술
- 지속 가능한 친환경 에너지 지반공학 기술
- 연구실
지반역학연구실
- 웹사이트 https://www.choogroup.org
- 주요 연구 분야
- 조계춘
- 주요 연구 분야
- 터널과 지하공간의 최적설계/공사기법
- 지하공간의 거동 특성 해석
- 도심지내 시공을 위한 민원저감형 대체공법 개발
- 바이오폴리머를 활용한 친환경 소재 개발
- 연구실
지반시스템연구실
- 웹사이트 http://geosystems.kaist.ac.kr
- 주요 연구 분야
- 인소영
- 주요 연구 분야
- 에너지 인프라 개발 및 투자
- 기후 리스크
- 기후 변화에 따른 자산가치 평가 및 경제성 분석
- 탄소중립 관련 공시제도 및 기업 데이터 분석
- 연구실
IMPACT Lab
- 웹사이트 https://www.sohyoung-in.com
- 주요 연구 분야