

SMART CITY
SMART INNOVATION
WEBZINE2021 Vol.04, No.2Featured
IRiS (Interactive Robotic Systems) Lab, Soft Growing (Vine) Robots-
- IRiS (Interactive Robotic Systems) Lab at KAIST, led by Prof. Jee-Hwan Ryu, is dedicated to improving people's lives by realizing advanced robotic technologies. Our mission is to develop the principles, technologies, and human resources in interactive robotic systems, especially targeting field robotics, including disaster response, building and construction, mining, agriculture, and more. We are particularly interested in:
-
• Telerobotics in extreme environments
-
• Soft Actuator and Exosuit
-
• Soft Growing Robot
-
• Autonomous vehicles and their application to construction robots
-
-
Among them, in this short article, we would like to introduce a soft growing (vine) robot for disaster response. Natural disasters such as earthquakes, hurricanes, or tsunamis, cause considerable structural damage. In the case of survivors trapped in the debris and fallen structures, timely search and rescue efforts can be the difference between life and death. However, oftentimes, the situation (be it unstable structures or dangerous substances, i.e., nuclear or chemical elements) inhibits human search and rescue efforts. In such cases, teleoperated robots can be utilized to provide immediate relief and rescue the survivors. However, the traditional (legged or wheeled) robots have a critical vulnerability when traversing unstructured and cluttered spaces. Due to their inherent design, their performance is highly dependent on the complexity of the environment.
Bio-inspired robots are not particularly a new phenomenon. Millions of years of evolution have optimized animals and plants to be particularly suited for their environments, and roboticists have been taking inspiration from nature for quite some time. However, plant-inspired, growing robots are a recent development with considerable potential breakthrough applications in search and rescue missions, deployable structures, and medical procedures.
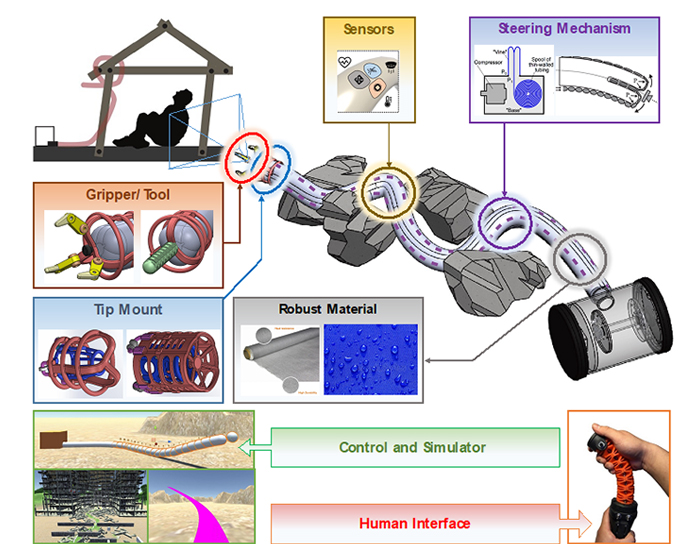
Unlike traditional robots, which move through surface contact to walk or run, the "vine robot" relies on growth for movement. Similar to vines and other plants, these robots have a grounded root, or "base," and can continually feed new material at its tip to grow in orders of magnitude to its original length. Because there is no relative motion between the robot surface and environment, the vine robot has tremendous advantages over traditional robots in exploring confined, unstructured, and dynamic environments encountered during search and rescue missions.
-
Among them, in this short article, we would like to introduce a soft growing (vine) robot for disaster response. Natural disasters such as earthquakes, hurricanes, or tsunamis, cause considerable structural damage. In the case of survivors trapped in the debris and fallen structures, timely search and rescue efforts can be the difference between life and death. However, oftentimes, the situation (be it unstable structures or dangerous substances, i.e., nuclear or chemical elements) inhibits human search and rescue efforts. In such cases, teleoperated robots can be utilized to provide immediate relief and rescue the survivors. However, the traditional (legged or wheeled) robots have a critical vulnerability when traversing unstructured and cluttered spaces. Due to their inherent design, their performance is highly dependent on the complexity of the environment.

-
- Vine robots can traverse confined spaces, including orifices that are smaller than their diameter, scale slopes or walls, climb over gaps, and largely travel unhindered by the general impediments encountered during search and rescue missions for disaster scenarios. Also, the structure of the Vine Robot is essentially a long pipe and can be utilized to transport water and sustenance to the trapped survivors for their immediate relief.