
최근소식
- 건설 IT 및 인식기반 로봇 연구실 (김아영 교수) 자율 주행 연구 소개
- 관리자 |
- 2016-06-20 10:34:32|
- 1224
- 2016-06-20 10:34:32|
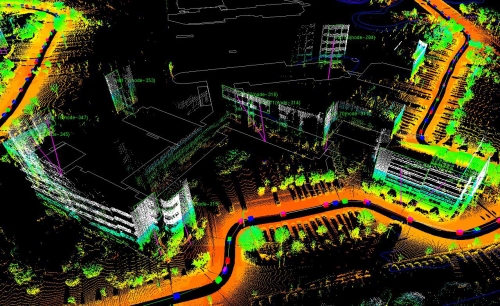
건설IT 및 인식기반 로봇 연구실 (김아영 교수)에서는 도시 환경을 매핑하고 자율 주행 자동차를 위한 정밀 지도를 생성하는 연구를 하고 있습니다. 도심환경의 불안정한 GPS 수신을 극복하고 자율 주행 자동차의 운행을 위한 정밀도를 얻기 위해 로봇공학의 위치 추정 기법을 적용하여 연구를 진행중입니다.
아래 링크에서 관련 동영상을 보실 수 있습니다.
https://youtu.be/oMFLTzs3lRw

| 첨부파일 |
|---|